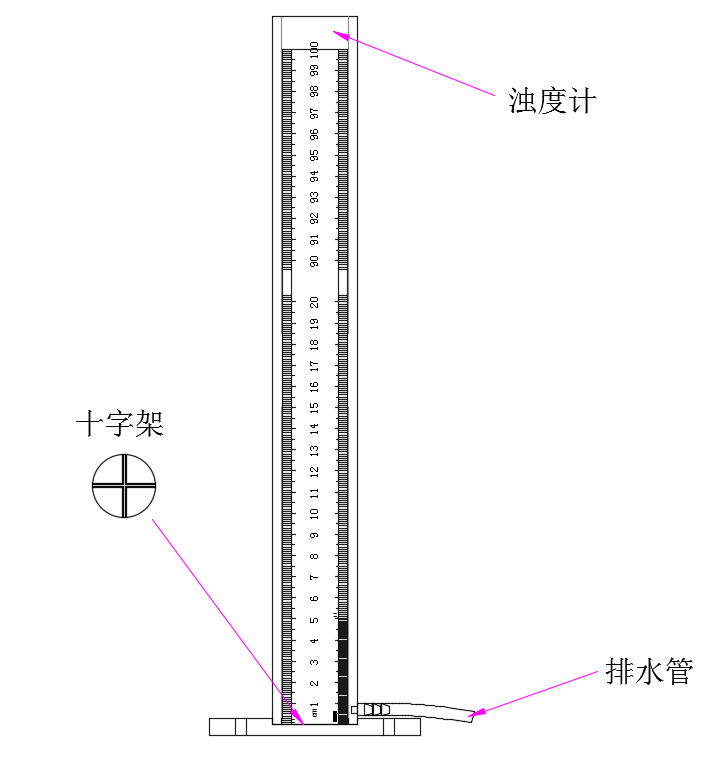
圖1 目測法設備示意圖
此方法操作簡單,適用性強,但是仍存在一定的缺陷。由于玻璃管的材質、高度、反光性能都會影響人的視覺判斷;每個檢驗人員的視力不同影響結果判斷;試驗人員的操作流程無法完全一致,結果也受人為因素影響;手動排液,精細度差,易造成結果偏差;以上缺陷易導致結果重現性差。
1.2 B法:濁度儀法
將樣液注入專用濁度檢測儀測量皿中測定。使用前應制作“吸光度—目測值”工作曲線并在檢測儀中輸入工作曲線回歸方程。“吸光度—目測值”數據要求至少30組,且其中的“目測值”應均勻分布于50mm~1000mm之間。測定時直接讀取濁度檢測儀顯示的mm值。
此方法可以減少人為、光線誤差,但是也有一定缺陷。比如:該方法需要取大量樣品結果,工作量大,若取樣少則代表性不夠;適用性不強,目前國內外羽絨清潔度都是用高度值表示,此法不是直接檢測高度值;此法需要檢驗人員對儀器原理有一定的理解,否則實行起來尚有難度。
2儀器系統結構
為了實現用攝像頭功能取代人眼識別,需要選擇高精度的攝像頭模組和特制的鏡頭來測試。具體步驟:固定焦點到刻有雙十字黑線的陶瓷片上,調整攝像頭參數使人眼看到的圖片和攝像頭捕獲到的圖像一致。在此過程中,電機升降會導致液面發生變化,需要考慮減慢測試過程中的上升下降速度。
2.1機械結構部分
本儀器主要由儀器機架、水位控制傳動裝置、圖像采集裝置、濁度計裝置、濁度計水箱、上下極限位、內部照明等組成。
儀器表面采用噴塑高溫固化處理久不褪色。儀器測量傳動裝置采用步進電機帶動絲桿運行,減少振動引起的數據波動。儀器內部封閉,使用固定照明燈管,建立穩定的試驗環境,以免受外界光線影響。儀器結構圖如圖2所示。

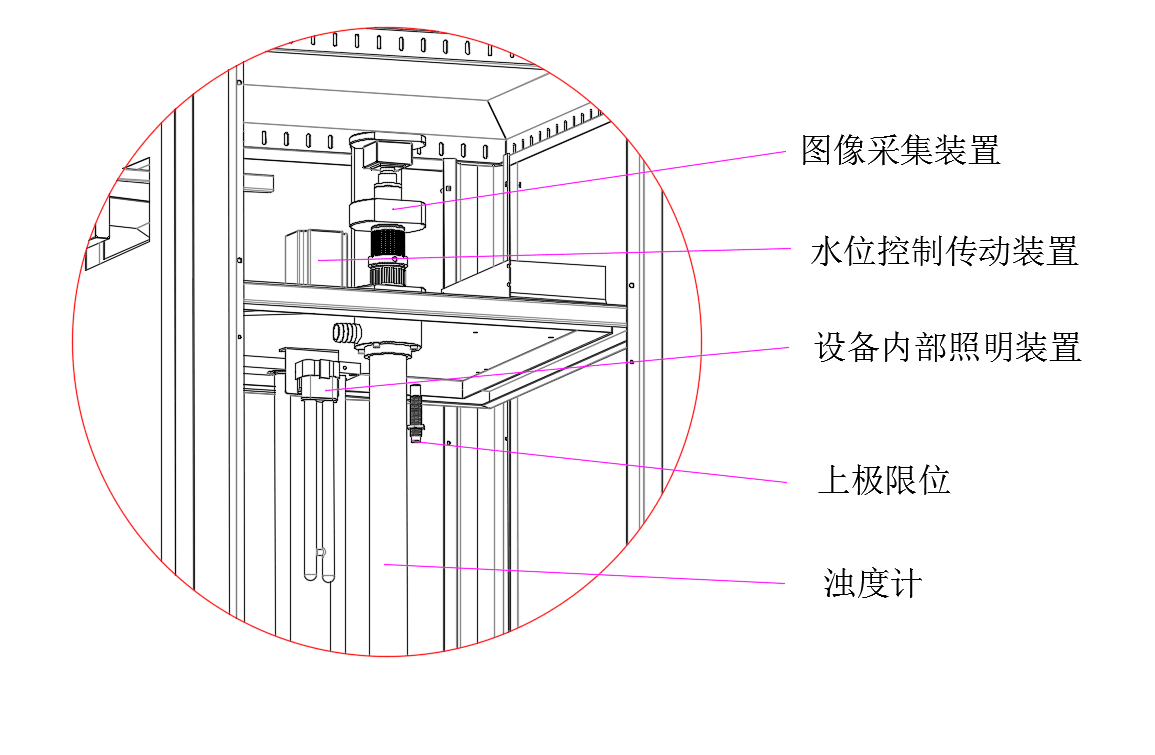
圖2 全自動清潔度測試儀示意圖
2.2硬件部分
本儀器主機硬件采用32位ARM處理器控制步進電機,帶動絲桿傳動裝置,穩定可靠,能夠設定不同測試速度進行試驗,儀器自動識別上下限位自動停止,保護儀器不被損壞,高精度數據處理移動高度轉化為羽絨液體升降高度,采用高清攝像頭實時采集圖片傳送給電腦進行圖片分析計算結果。
2.3軟件部分

圖3 全自動清潔度測試儀軟件工作示意圖
通過32位ARM處理器控制步進電機轉動使液面升降,記錄頁面的實時高度;同時在升降過程中對圖像進行高速采集,對相鄰的圖片進行對比, 剔除模糊的、有干擾的圖像數據,再把實時采集到的有用圖像進行灰度二值化,使用高斯濾波去除噪聲,canny算子找到圖像中存在的輪廓,再對輪廓進行霍夫直線檢測(根據多次不同樣品溶液的測試,統計二級評定標準時的直線顏色范圍值,通過設置霍夫直線檢測時閾值來有效來判斷能否檢測到直線存在),在檢測到的直線中判斷是否有相互垂直的直線或接近垂直的直線并記錄,再對垂直的直線中遍歷所有的像素點的顏色值并統計,通過統計結果對出現概率多的顏色值,再根據標準評價要求對相應顏色等級要求,根據標準要求是剛好能看清黑色雙十字線,所以需要使液面從頂部往下走,為了確認圖像,在連續檢測到兩次圖像存在兩組相互垂直的直線,據此認定液面高度為羽絨的透明度。
通過使用攝像頭測試的透明度準確性高、結果穩定、重現性好,能夠有效地減小目前國內外檢測羽絨濁度使用的目視法帶來的誤差。
3手動清潔度儀與自動清潔度儀測試對比
為確認開發的自動清潔度儀的準確度,將該設備與手動清潔度儀進行測試對比,選取3種不同清潔度的羽絨,每種測3次取平均值,試驗數據結果對比如表1所示:
表1 測試結果(高度)對比

由表1可觀察出,手動清潔度儀的重現性差,其偏差范圍在5-15mm范圍內;自動清潔度儀由于通過攝像頭對圖片的抓取與處理,數據穩定可靠,其偏差范圍在1-5mm范圍內。由此可見,手動清潔度儀因人的主觀因素影響,視力、感官都會影響結果的判斷,誤差大;自動清潔儀所獲取的數據科學可靠,通過電腦軟件直接評判,避免了人為因素引起的誤差,具有較高的重現性和穩定性,可大大提高清潔度檢測的公正性和客觀性。
4結束語
羽絨自動清潔度儀基于高清攝像頭模塊,結合儀器的自動化升降,用電腦實時采集圖片進行圖片分析處理,滿足了數據準確度高、重現性強、適用性高、自動化程度高的要求,也滿足了GB/T 10288-2016《羽絨羽毛試驗方法》的要求。該儀器的開發開規避了不同手動檢測人為誤差,數據穩定可靠,值得推廣。
參考文獻
[1] GB/T 10288-2016《羽絨羽毛試驗方法》
[2] GB/T 10288-2003《羽絨羽毛試驗方法》

作者單位:
吳瓊、張惠玲, 江西省纖維檢驗局;
蔡濤,石獅市中紡學服裝及配飾產業研究院;
蔡娜娜,泉州市美邦儀器有限公司。






 閩公網安備 35058302350905號
閩公網安備 35058302350905號